Introduction
By connecting DCS Mission Scripting lua environment and LotAtc Server you enable:
- Use LotAtc mission script API as ATIS or DCS user flag
Installation / Configuration
DCS World modification
Only needed to use LotAtc mission script API
DCS Server owner need to patch a file in DCS World directory to enable external socket connection to LotAtc Server.
The file to modify is DCS World/Scripts/MissionScripting.lua, you have to add the line:
dofile('Scripts/ScriptingSystem.lua')
-- The following line must be added
dofile(lfs.writedir().."Mods\\services\\LotAtc\\lua utils\\lotatcMissionServer.lua")
Be careful, on each DCS update, this file will be reverted and you have to do the modification again, use OvGME or equivalent is certainly a good idea
Once done, no more modification EVEN if LotAtc Server is updated.
LotAtc Server Configuration
Only needed to use LotAtc mission script API
You need to enable Json server in LotAtc Configurator.
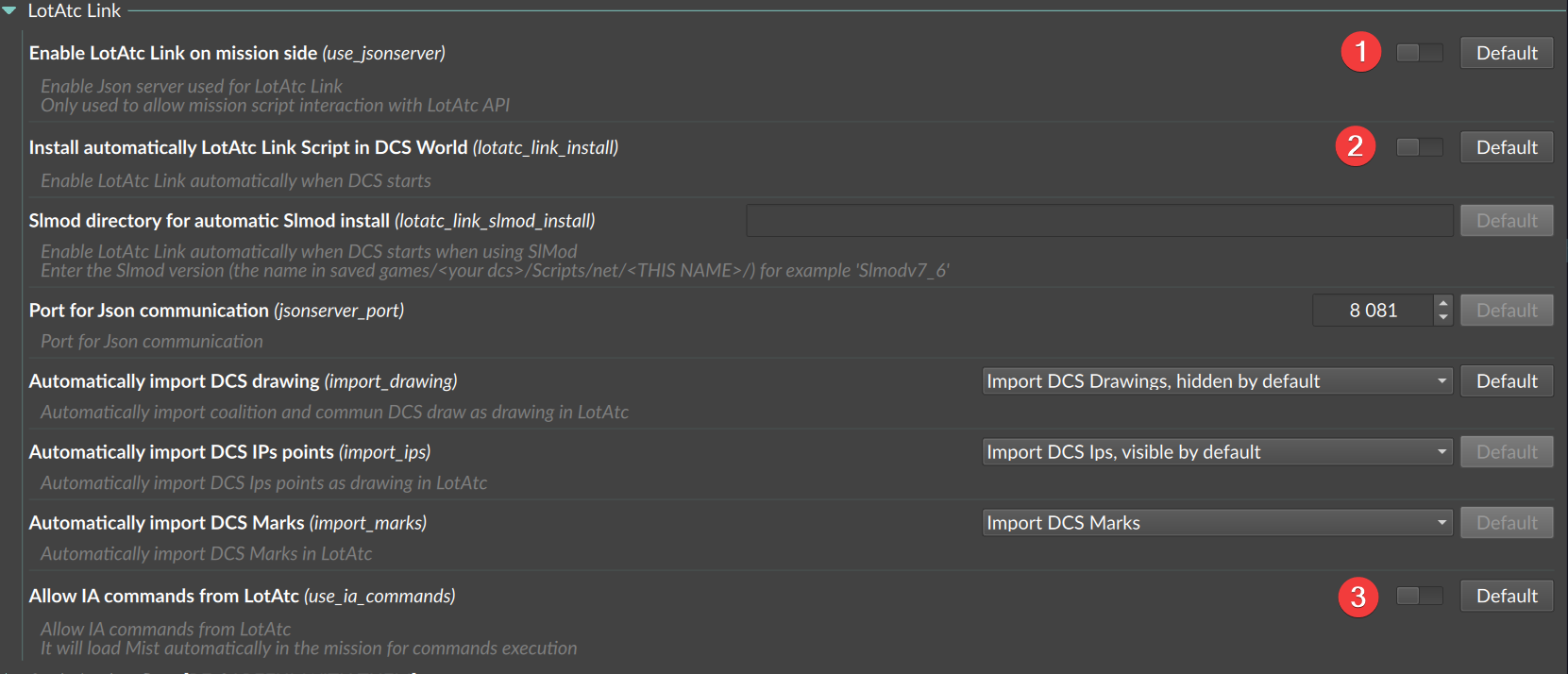
The default port is 8081, if you run several DCS instances, please modify it here.
Mission script
Only needed to use LotAtc mission script API
If you want LotAtc Server interaction with your mission, you have to add the trigger DO SCRIPT FILE and the line:
example.lua
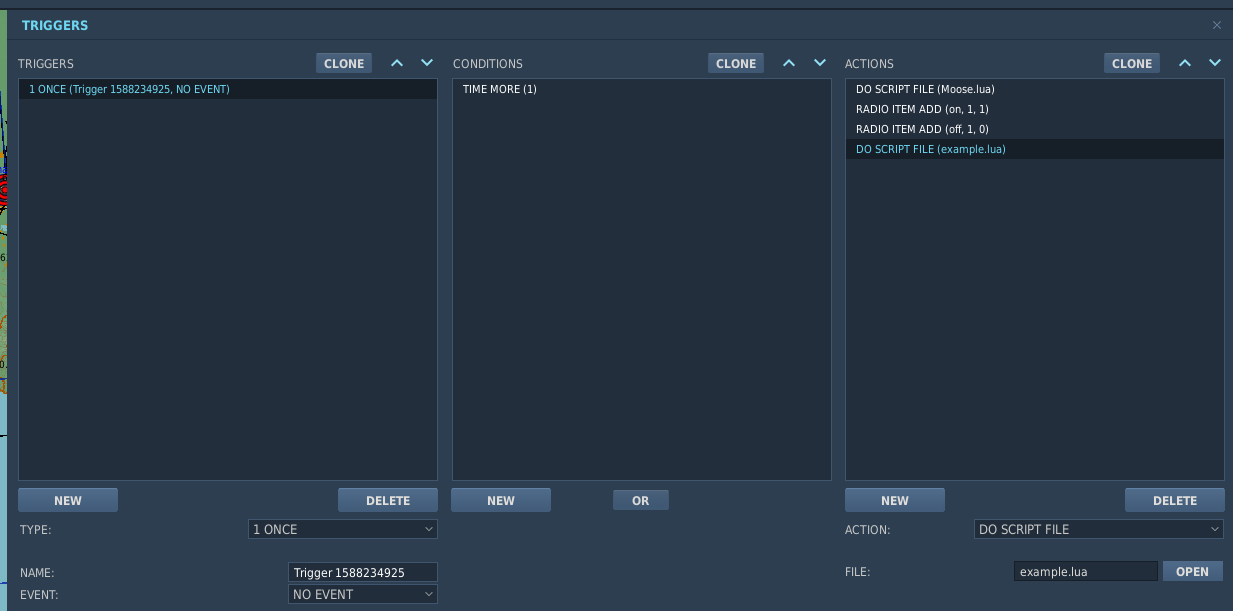
In this example, I load first Moose.lua, then add some radio item, then load my example.lua file that will use LotAtcLink and Moose.
Once done, no more need to modify Mission file even on LotAtc Upgrade, all is done in background for you
Tutorial
Oudated with 2.4.0, WIP on update this part of the doc
Here you will find some fast steps to test (or integrate) DCS AI interaction.
- Add the line in
DCS World/Scripts/MissionScripting.luaas explained in DCS World Modification above. (only need for DCS Host): - In Mission Editor, add a
DO SCRIPT FILEwith Moose.lua file you can grab there - Add a
DO SCRIPT FILEwith example.lua file you find in your DCS Servermods/services/LotAtc/lua utils/example.lua - Add an awacs and some random units
- Launch the mission (can be done from mission editor)
- Connect with LotAtc Advanced and connect with admin rights
- Use
Alt+right clickon any unit to change its heading, see here
Dev Area
Introduction
LotAtc Link provides a two-way communication with LotAtc Server. It is in early developpement but possibility are huge:
- Moving IA
- Create/Destroy any unit
- Interact with lua mission flag
- …
As LotAtc is always opened to others projects, the choice has been made to open this link to anybody in order for the interface to be implemented by any lua framework (pure DCS lua, Moose, Mist,…).
I hope that a community can be created around LotAtc Link in order to build fantastic mission with it!
Want to help ?
Join LotAtc Discord and join the #mission-lua-scripting channel!
API
When using LotAtcLink you have to connect your code to LotAtcLink callbacks:
See Saved Games\<DCS Instance>\mods\services\LotAtc\lua utils\example.lua as example.
Here is a complete example to make IA turning with LotAtc Advanced!
--[[Here is a simple example to use with lotatcMissionServer]]--env.info('initializing My LotAtc Link example...')local LCallbacks = {}--------------------------------------------------------------
-- LotAtc Link mission script example file
-- Copyright RBorn Software
-- Author: DArt - LotAtc
-- You can modify and adapt it
--------------------------------------------------------------
LCallbacks.command_status = function(env, msg)
env.info("LotAtcLink: have version ".. msg.version)
local _s = string.format("trigger.action.outText('LotAtcLink is connected with LotAtc %s', 10 )", msg.version)
local f, error_msg = loadstring(_s, "LotAtcLink")
if f then
setfenv(f, lotatcLink.mission_env)
local success, result = pcall(f)
if success then
env.info("LotAtcLink: success")
else
env.info("LotAtcLink: failed")
env.info( error_msg )
env.info( result )
end
end
end
--------------------------------------------------------------
LCallbacks.command_order_props = function(env, order)
if order then
env.info("LotAtcLink: receive props order")
env.info("------ Treat props")
-- lotatcLink.debugTable(order, 0, 3)
local _group = nil
if order.group_name then
env.info(" o " .. order.group_name)
env.info(" o " .. order.unit_name)
_group = GROUP:FindByName(order.group_name)
end
if _group and (_group:GetPlayerCount() == 0) then
loe_order(env, order, _group)
end
end
end
--------------------------------------------------------------
LCallbacks.command_order_delete = function(env, order)
if order then
env.info("LotAtcLink: receive delete order")
env.info("------ Treat delete")
-- lotatcLink.debugTable(order, 0, 3)
local _group = nil
if order.group_name then
env.info(" o " .. order.group_name)
env.info(" o " .. order.unit_name)
_group = GROUP:FindByName(order.group_name)
end
if _group and (_group:GetPlayerCount() == 0) then
env.info( "Found!" )
env.info(" o delete")
_group:Destroy(true)
end
end
end
--------------------------------------------------------------
LCallbacks.command_order_command = function(env, order)
if order then
env.info("LotAtcLink: receive command order")
env.info("------ Treat command")
-- lotatcLink.debugTable(order, 0, 3)
local _group = nil
if order.group_name then
env.info(" o " .. order.group_name)
env.info(" o " .. order.unit_name)
_group = GROUP:FindByName(order.group_name)
end
if _group and (_group:GetPlayerCount() == 0) then
loe_command(env, order, _group)
end
end
end
--------------------------------------------------------------
loe_order = function(env, order, _group)
env.info(" o " .. order.property)
if order.property == "headingDeg" then
loe_order_headingDeg(env, order, _group)
elseif order.property == "altitude" then
loe_order_altitude(env, order, _group)
elseif order.property == "position" then
loe_order_position(env, order, _group)
elseif order.property == "groundSpeed" then
loe_order_groundSpeed(env, order, _group)
else
env.info("-- Not yet supported --")
end
end
--------------------------------------------------------------
loe_order_headingDeg = function(env, order, _group)
env.info("change heading to " .. order.value)
local FromCoord = _group:GetCoordinate()
local h = _group:GetHeading()
local gs = _group:GetVelocityKMH()
-- Use a first point for better turn
FromCoord = FromCoord:Translate(gs / 3600. * 15, h)
local ToCoord = FromCoord:Translate(gs * 2 * 1000, tonumber(order.value))
local RoutePoints = {}
if _group:IsAir() then
RoutePoints[#RoutePoints + 1] = FromCoord:WaypointAirFlyOverPoint("BARO", gs)
RoutePoints[#RoutePoints + 1] = ToCoord:WaypointAirFlyOverPoint("BARO", gs)
local RouteTask = _group:TaskRoute(RoutePoints)
_group:SetTask(RouteTask, 1)
else
RoutePoints[#RoutePoints + 1] = FromCoord:WaypointGround(gs)
RoutePoints[#RoutePoints + 1] = ToCoord:WaypointGround(gs)
_group:Route(RoutePoints, 1)
end
end
--------------------------------------------------------------
loe_order_altitude = function(env, order, _group)
if _group:IsAir() then
env.info("change altitude to " .. order.value)
local alt = tonumber(order.value)
Group.getByName(order.group_name):getController():setAltitude(alt, true, "BARO")
end
end
--------------------------------------------------------------
loe_order_groundSpeed = function(env, order, _group)
env.info("change groundspeed to " .. order.value)
local n_gs = tonumber(order.value) * 0.27777777778
Group.getByName(order.group_name):getController():setSpeed(n_gs)
end
--------------------------------------------------------------
loe_order_position = function(env, order, _group)
env.info(" --> change position " .. order.coord.latitude .. " " .. order.coord.longitude)
local FromCoord = _group:GetCoordinate()
-- env.info( FromCoord )
local _pos = COORDINATE:NewFromLLDD(order.coord.latitude, order.coord.longitude) --, FromCoord:GetPointVec2():GetAlt())
local _name = _group.GroupName
_group:Destroy(true)
_newgroup = SPAWN:New(_name):SpawnFromVec3(_pos:GetVec3())
env.info(" --> change position ok")
end
--------------------------------------------------------------
loe_command = function(env, order, _group)
env.info(" o " .. order.property )
if order.property == "rtb" then
loe_command_rtb(env, order, _group)
elseif order.property == "cap" then
loe_command_cap(env, order, _group)
elseif order.property == "orbit" then
loe_command_orbit(env, order, _group)
elseif order.property == "hold" then
loe_command_hold(env, order, _group)
else
env.info("-- Not yet supported --")
end
end
--------------------------------------------------------------
loe_command_rtb = function( env, order, _group )
env.info( "RTB on" .. order.value )
local _airbase = AIRBASE:FindByName(order.value)
if _airbase then
FromCoord = _group:GetCoordinate()
local AirbasePointVec2 = _airbase:GetPointVec2()
local AirbaseAirPoint = AirbasePointVec2:WaypointAir(
POINT_VEC3.RoutePointAltType.BARO,
"Land",
"Landing",
_group:GetUnit(1):GetDesc().speedMax
)
AirbaseAirPoint["airdromeId"] = _airbase:GetID()
AirbaseAirPoint["speed_locked"] = true
RoutePoints = {}
RoutePoints[#RoutePoints+1] = FromCoord:WaypointAirFlyOverPoint( "BARO", _group:GetVelocityKMH())
RoutePoints[#RoutePoints+1] = AirbaseAirPoint
RouteTask = _group:TaskRoute( RoutePoints )
_group:SetTask(RouteTask, 1 )
end
end
--------------------------------------------------------------
loe_command_cap = function( env, order, _group )
env.info( "CAP on")
ZoneA = ZONE_RADIUS:New( "Zone A".. _group.GroupName, _group:GetVec2(), 30000 )
AICapZone = AI_CAP_ZONE:New( ZoneA, 500, 1000, 500, 600 )
AICapZone:SetControllable( _group )
AICapZone:SetEngageZone( ZoneA ) -- Set the Engage Zone. The AI will only engage when the bogeys are within the CapEngageZone.
AICapZone:__Start( 1 ) -- They should statup, and start patrolling in the PatrolZone.
end
--------------------------------------------------------------
loe_command_orbit = function( env, order, _group )
env.info( "Orbit here")
local FromCoord = _group:GetCoordinate()
local gs = _group:GetVelocityMPS()
local h = _group:GetHeading()
local alt = _group:GetUnit(1):GetAltitude()
-- Use midpoint for better transition
local ToCoord = FromCoord:Translate( gs*30, h )
ToCoord:SetAltitude(alt)
local Task = _group:TaskOrbitCircle( alt, gs, ToCoord )
_group:SetTask(Task)
end
--------------------------------------------------------------
loe_command_hold = function( env, order, _group )
env.info( "Hold here")
local Task = {}
if _group:IsAir() then
Task = _group:TaskHoldPosition()
else
Task = _group:TaskHold()
end
_group:SetTask(Task)
end
--------------------------------------------------------------
lotatcLink.registerCallbacks( LCallbacks )
env.info('My LotAtc Link initialized')~~~
| Callback | Description | Parameters |
| :- | :- | :- |
| `command_status` | First call when LotAtcLink is initialized | data.version contains LotAtc Version used |
| `command_order` | Call on each LotAtc Instructor command | data.orders contains one or more orders to execute (see orders below) |
#### Orders
A lua order object have:
> order.object
| Member | Description |
| :- | :- |
| order_name | "order" |
| group_name | DCS Group name |
| unit_name | DCS Unit name |
| property | Property name that changes |
| value | New value |
Property can be:
| Name | Description |
| :- | :- |
| headingDeg | new heading in degrees |
| altitude | new altitude in meters |
| groundSpeed | new ground speed in km/h |
#### Flags
You export a DCS flag to [LotAtc Advanced](/product/02_advanced.html). It can be read and write directly from there.
Mission script must be initialized as described above then, you have to add the trigger `DO SCRIPT` and the line:
~~~lua
lotatcLink.registerUserFlag('1', 'reload', 'Reloading Scritpting')
Parameters are:
| Parameter | Description |
|---|---|
| id of the flag | |
| short name | use for button text in LotAtc |
| description | use for description text in LotAtc |
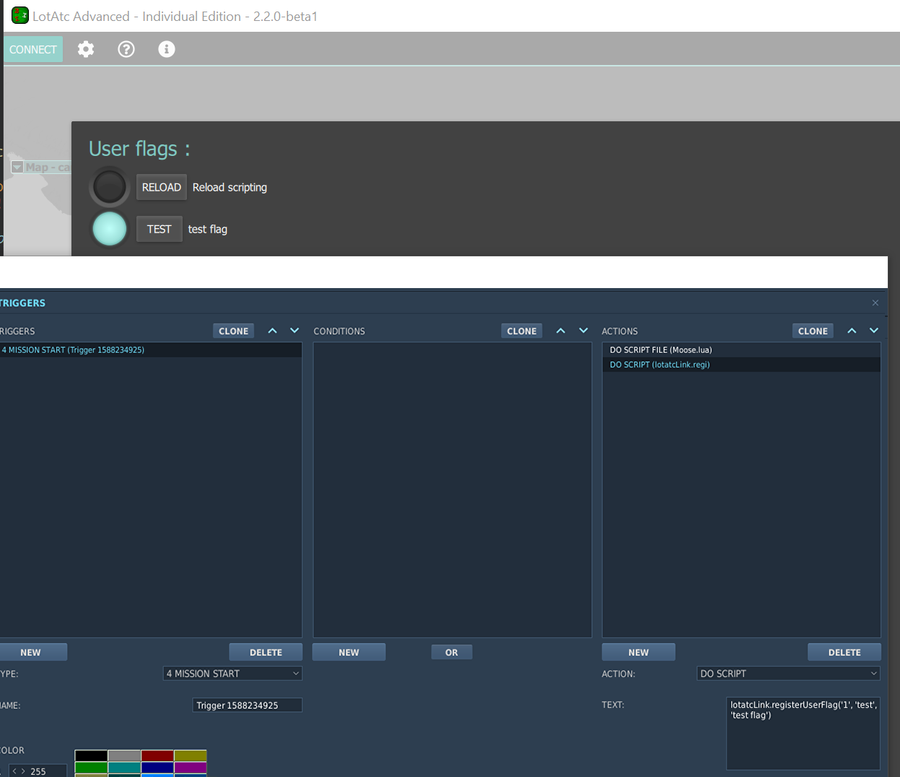
Once registered, flag is displayed in LotAtc and reflect current status. If user click on the flag button in LotAtc, mission script will be updated.
A command order is also generated in LotAtcLink that you can used if you need it:
order
| Member | Description |
|---|---|
| order_name | “flag” |
| number | DCS flag id |
| value | New value |
Send message to controllers
You can send a message to all controllers of a coalition.
lotatcLink.sendToControllers('blue', 'my message')
Parameters are:
| Parameter | Description |
|---|---|
| coalition | Coalition of the controller to send the message to (blue or red) |
| message | The message to send |
Set unit classification for a specific unit
You can set an unit classification from the mission lua.
lotatcLink.setClassification('blue', 'my_unit', 'friend', 'air', 'fighter' )
Parameters are:
| Parameter | Description |
|---|---|
| coalition | Coalition of the controller to send the message to (blue or red) |
| unit_name | Unit name |
| classification | Unit classification, ‘’ to not change |
| dimension | Unit dimension, ‘’ to not change |
| sub_dimension | Unit sub dimension, ‘’ to not change |
See classification for more information on the fields.